|
Download Members: $0.00 Non‑Members: $75.00 |
Buy Now |
Publication Details
| Published Date: | |
|---|---|
| Authors: | Xi Zhang, Xu Zhang, Weiqing Chu, Dinghao Feng |
| Company: | CMSC |
| Print Format: | Technical Paper |
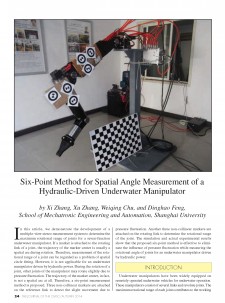
| Citation: | Xi Zhang, Xu Zhang, Weiqing Chu, Dinghao Feng, "Six-Point Method for Spatial Angle Measurement of a Hydraulic-Driven Underwater Manipulator," The Journal of the CMSC, Vol. 9, No. 2, Autumn 2014 |
Abstract
In this article, we demonstrate the development of a multiple-view stereo measurement system to determine the maximum rotational range of joints for a seven-function underwater manipulator. If a marker is attached to the rotating link of a joint, the trajectory of the marker center is usually a spatial arc during rotation. Therefore, measurement of the rotation range of a joint can be regarded as a problem of spatial circle fitting. However, it is not applicable for an underwater manipulator driven by hydraulic power. During the rotation of a joint, other joints of the manipulator may rotate slightly due to pressure fluctuation. The trajectory of the marker center, in fact, is not a spatial arc at all. Therefore, a six-point measurement method is proposed. Three non-collinear markers are attached on the reference link to detect the slight movement due to pressure fluctuation. Another three non-collinear markers are attached on the rotating link to determine the rotational range of the joint. The simulation and actual experimental results show that the proposed six-point method is effective to eliminate the influence of pressure fluctuation while measuring the rotational angle of joints for an underwater manipulator driven by hydraulic power.



